
*(注:3D效果需求,具体以实物为准)
*由于螺丝规格较小,请手动安装。避免使用电动螺丝刀,以免扭力过大导致螺丝断裂。
- ▶安全注意事项01
- ▶遥控器概述02
- ▶基本操作指南03
- ▶快捷设置04
- ▶系统设置05
- ▶回传信息解释说明06
为确保您和他人的人身安全,并避免设备损坏,请在使用本遥控器前认真阅读以下安全须知。
01使用前须知
02操作安全
- 电池电量充足;
- 遥控器已正确连接飞行器;
- 摇杆归中正常,油门为最低位;
- 天线安装牢固,无松脱或遮挡;
- 所有功能开关处于默认安全状态。
03存储与维护
04法规遵守
01遥控器按键介绍


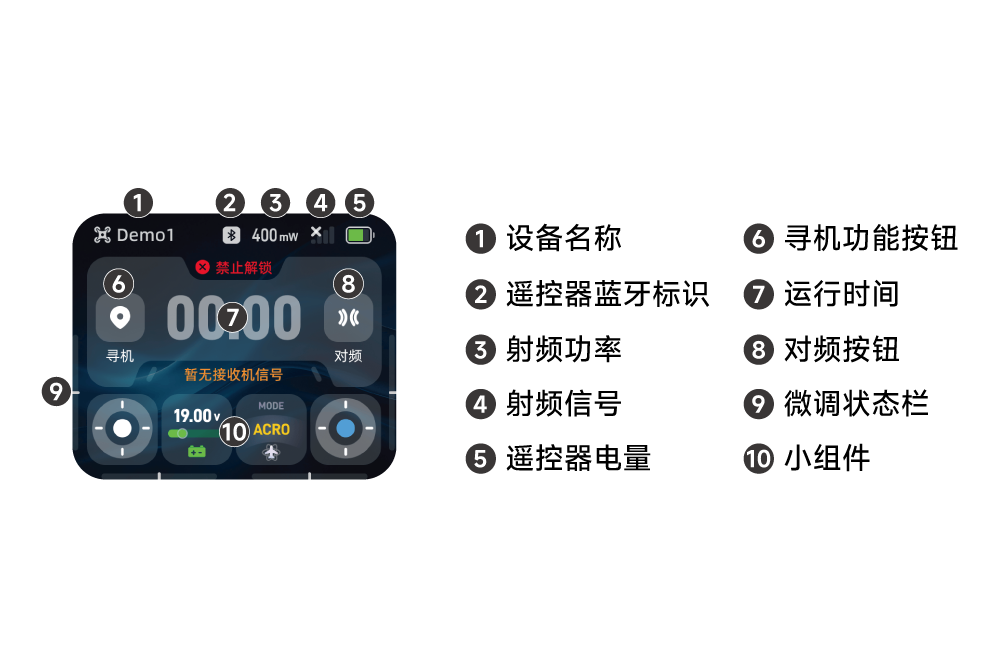
02遥控器主界面介绍
01APP互联与飞控调参介绍
遥控器支持与移动端 APP 互联功能,用户可根据外场调试与飞行需求,在手机端直观地对遥控器各项参数进行精细化配置,并能直接对飞控进行蓝牙调参,大幅提升调参效率。
- 1
主界面向下滑动呼出菜单,开启「蓝牙」开关。
- 2
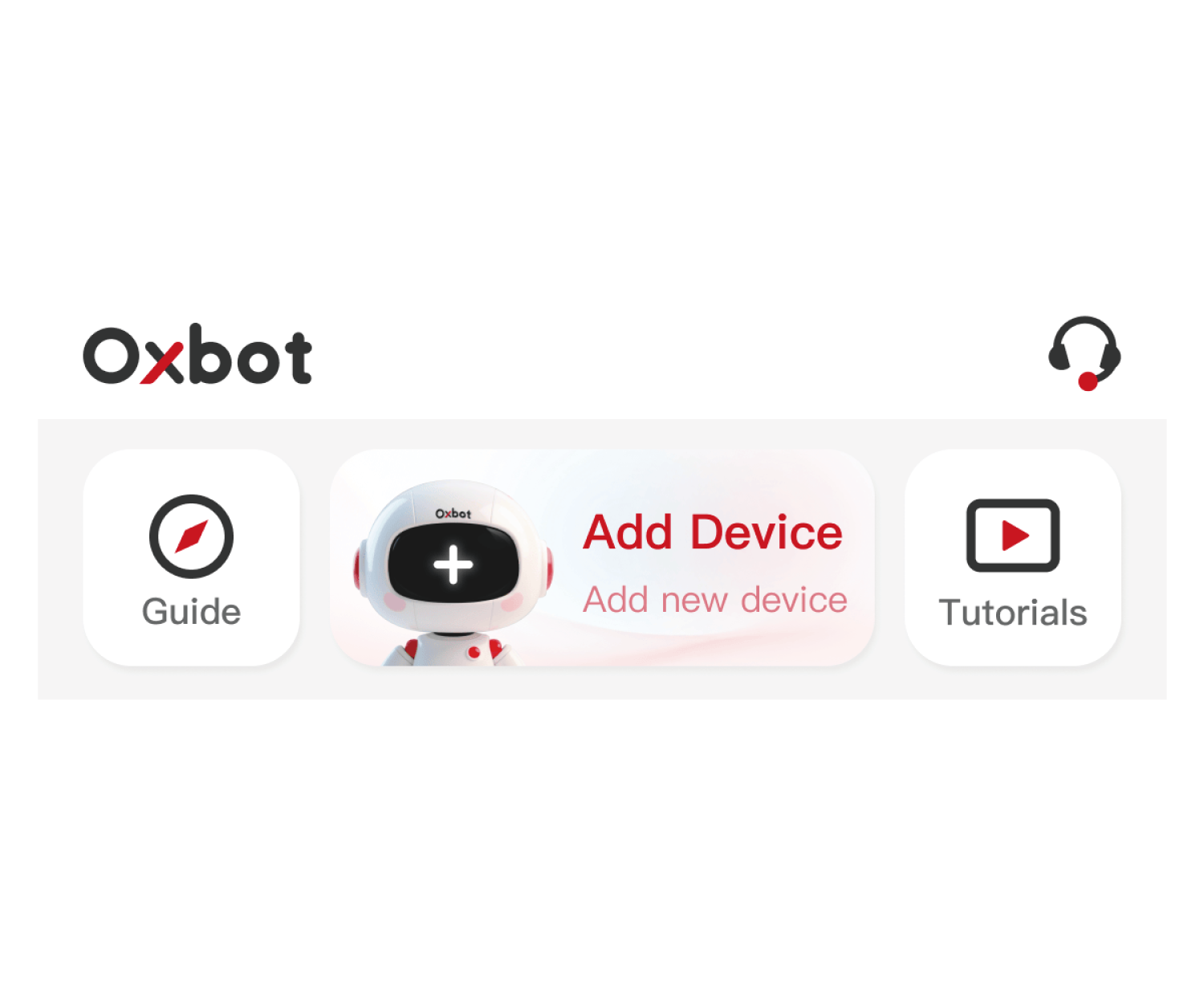
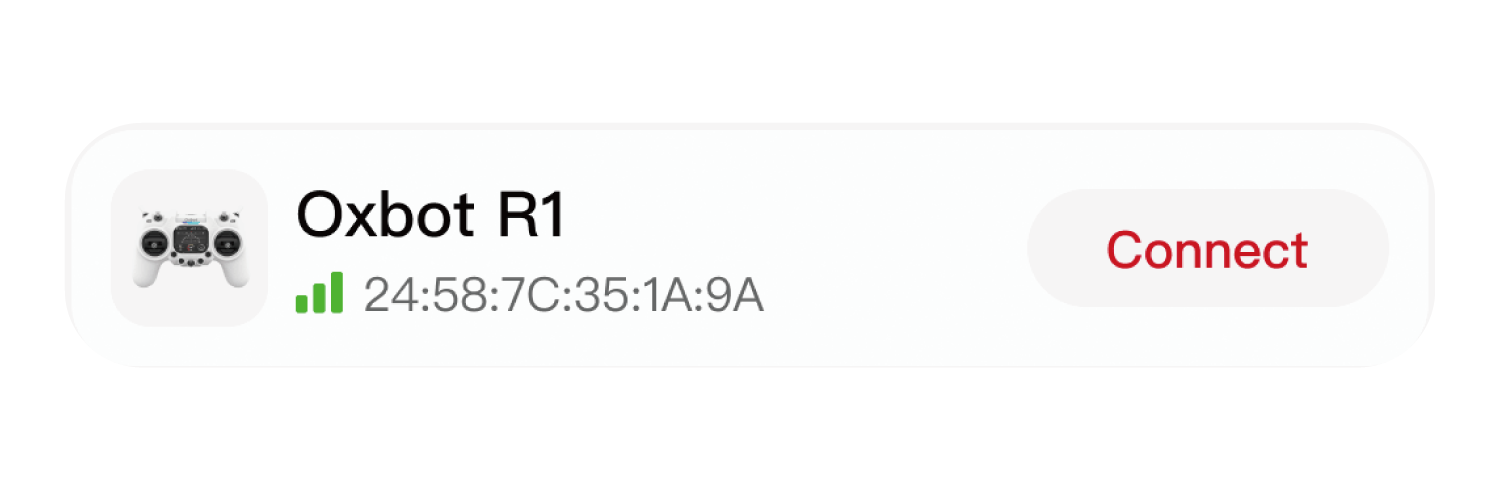
打开手机 Oxbot APP,点击「添加新设备」,搜索并连接本遥控器。
- 3
连接成功后,即可在手机端进行各项个性化配置与固件维护。
- 1
主界面向下滑动呼出菜单,开启「蓝牙」开关。
- 2
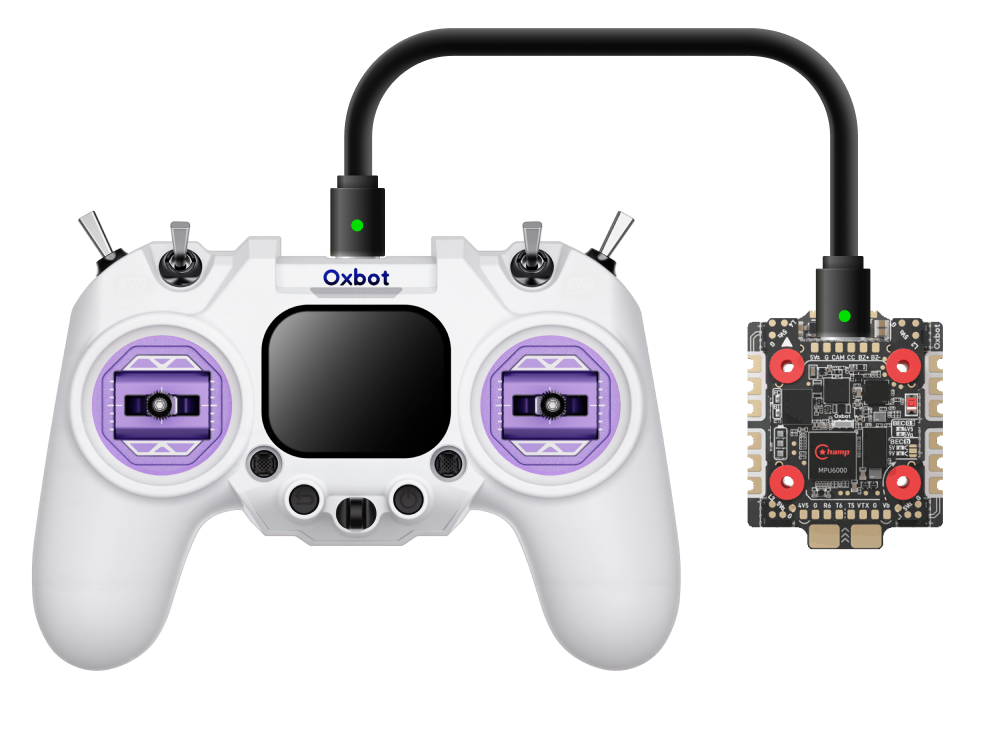
使用附赠的 Type-C 数据线,将遥控器与穿越机飞控相连。
- 3
打开手机 SpeedyBee APP,点击「+」搜索遥控器设备。
- 4
点击「立即连接」。

02亮度及音量调节说明
主界面向下滑动呼出菜单,拖动对应的滑块即可调节音量与亮度。调节时,系统会实时同步屏幕亮度并播放提示音,方便您直观确认效果。
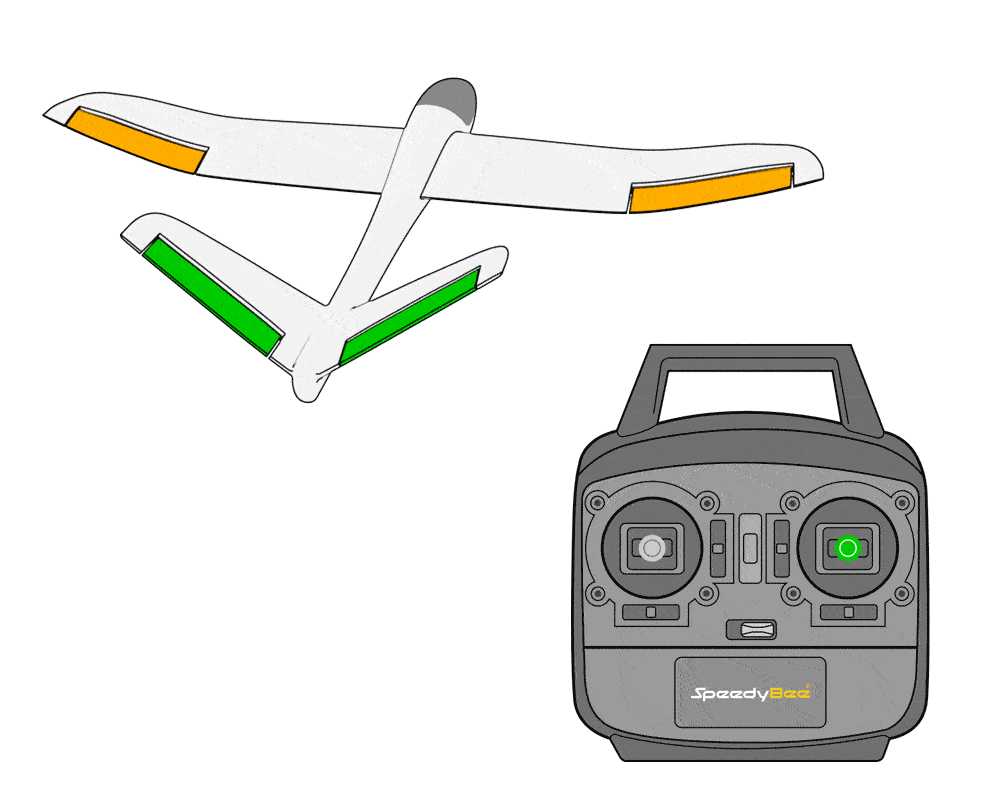
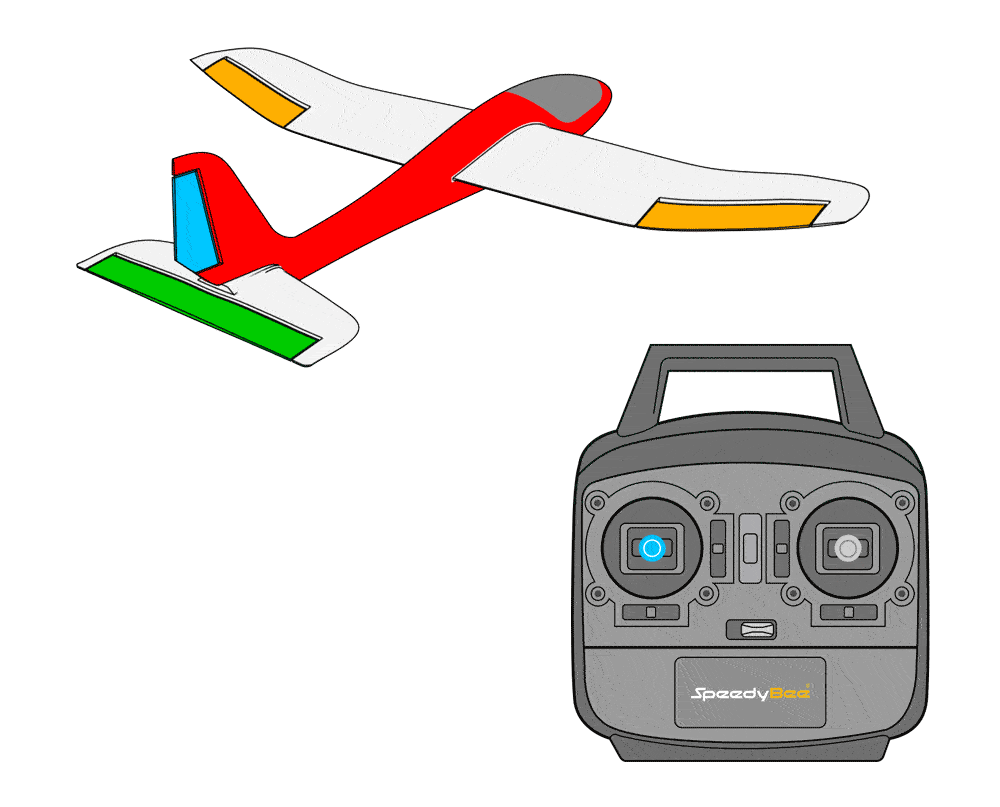
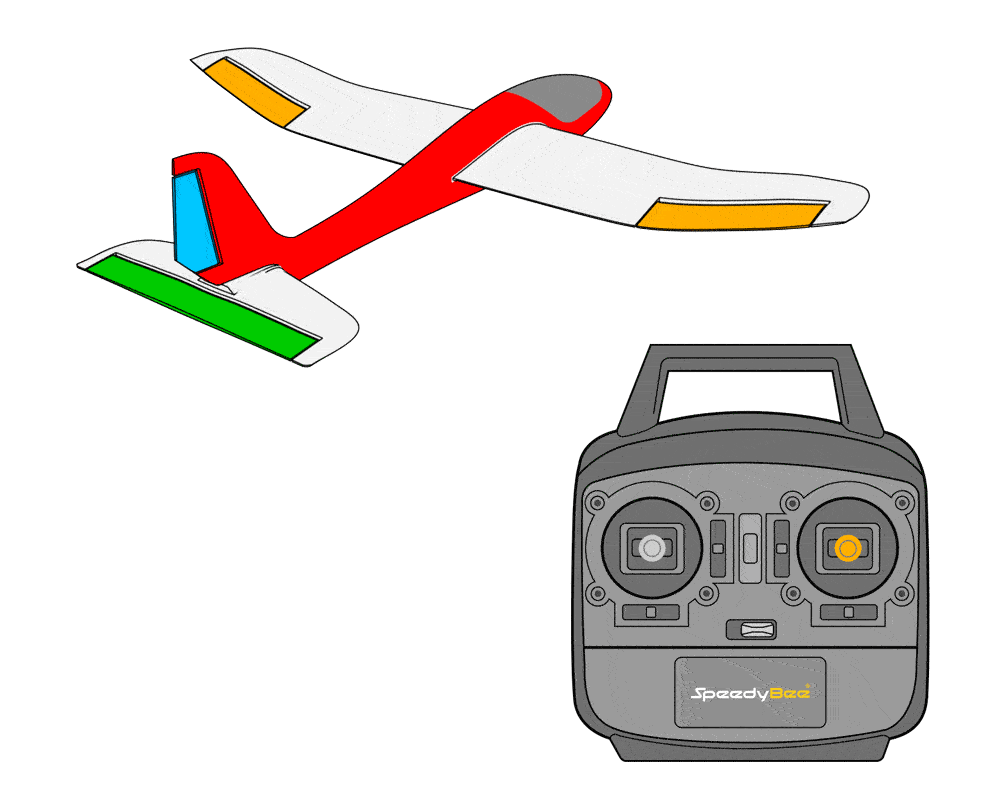
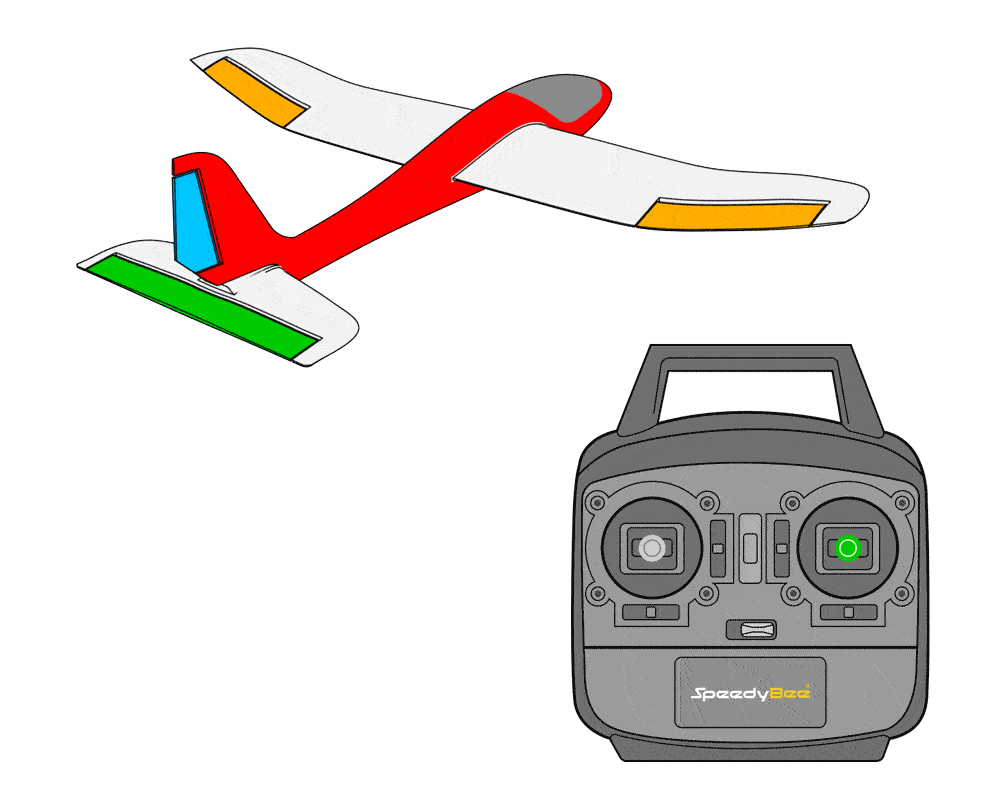
03默认通道定义及功能说明(以美国手为例)
遥控默认的通道定义为:AETR顺序。功能说明如下:
| 摇杆 | 方向 | 通道 | 功能 | 英文缩写 | 功能说明 |
|---|---|---|---|---|---|
| 右摇杆 | 左右 | CH1 | 副翼(横滚) | AIL | 飞机左右横滚控制 |
| 右摇杆 | 上下 | CH2 | 升降舵(俯仰) | ELE | 飞机前后俯仰控制 |
| 左摇杆 | 上下 | CH3 | 油门 | THR | 油门升降控制 |
| 左摇杆 | 左右 | CH4 | 方向舵(偏航) | RUD | 飞机左右方向控制 |
04微调(TRIM)按键使用说明(以美国手为例)
在飞行过程中,若发现飞行器存在轻微偏航、横滚或俯仰方向上的自动漂移现象,可通过微调(TRIM)按键进行修正,以保持飞行稳定性。
微调分布与对应关系如下:
| 按键位置 | 控制通道 | 操作方向 | 控制功能 |
|---|---|---|---|
| 左侧 TRIM | CH3(油门) | 上 / 下 | 增加 / 减少油门微调值 |
| CH4(方向) | 左 / 右 | 减小 / 增加偏航(方向舵)微调值 | |
| 右侧 TRIM | CH2(升降) | 上 / 下 | 增加 / 减少俯仰微调值 |
| CH1(副翼) | 左 / 右 | 减小 / 增加横滚(副翼)微调值 |
05模型选择、切换及布局编辑
本遥控器支持多模型功能,可同时保存多个飞行器的设置数据(如通道映射、开关功能、参数等),方便用户快速在不同飞行器之间切换使用。
- 不同模型的通道定义、开关功能可能不同,切换后请先进行飞行前检查。
- 模型切换不会影响其他已保存模型的参数设置。
01查看通道状态
为方便用户实时监控当前通道输出状态,遥控器提供了“查看通道”功能,可显示各通道的实时数值及对应控制器件(摇杆/开关)的响应情况。
- 1
从主界面向上滑动,进入【快捷设置】界面。
- 2
点击【查看通道】按钮,即可进入通道监控页面,观察各通道随摇杆和开关的响应变化。
02智能寻机功能
意外落草或炸机时,助您快速定位。
- 1
在遥控器点击「寻机」按钮,或从主界面向上滑动进入【快捷设置】界面。
- 2
点击「寻机」按钮,屏幕生成位置二维码。
- 3
使用手机扫码即可查看飞行器最后已知位置,并可通过地图导航到掉落位置。
03射频模块切换
本遥控器内置 ELRS 高频模块,并预留 Nano 外置高频头接口,支持安装支持 ELRS 协议的外部发射模块(不兼容其他协议,如TBS、SBUS、Futaba等)。
- 1
从主界面由下向上滑动,进入【快捷设置】界面。
- 2
点击「射频输出」按钮,再选择【内置发射】或【外置发射】。
- 3
系统将自动切换射频输出模块。
- Nano 外置高频头需先正确安装在遥控器背部的模块仓中,且通电正常。
- 切换过程中可能短暂中断信号,请在非飞行状态下进行切换。
04射频模块功率切换
- 1
在主界面自下向上滑动,进入「快捷设置」界面。
- 2
点击【功率】按钮,进入功率选择菜单。
- 3
选择目标功率档位(例如:100mW),点击【切换】按钮,系统将执行功率切换。
- 每次切换功率后建议重新确认飞行器连接状态。
- 高功率档位会增加遥控器发热与耗电,请根据实际需求合理选择。
当您使用 Nano 外置高频模块(仅支持 ELRS 协议)时:
- 外置模块需先安装在遥控器背部并正确连接电源。
- 请先在【快捷设置】界面中启用【外置发射】模块,切换至外置模块模式后,才能使用对应的功率设置功能。
- 若 Lua 脚本未正确安装或损坏,功率菜单将无法正常显示,请重新安装对应脚本。
05ELRS 设置说明
本遥控器内置 ELRS Lua 脚本配置程序,可通过快速设置 ELRS 协议相关参数,无需手动编辑代码或使用外部软件。
该脚本支持以下核心功能:
| 功能名称 | 功能说明 |
|---|---|
| Packet Rate | 设置遥控信号的数据传输频率,影响控制延迟与链路稳定性。 |
| Telem Ratio | 调整遥测回传的频率比例,用于平衡控制链路与遥测数据之间的带宽分配。 |
| Model Match | 启用后,仅在模型匹配 ID 完全一致时遥控器才与飞行器连接,提升操作安全性,防止误控。 |
| Bluetooth | 控制ELRS蓝牙功能的启用与关闭,可用于无线连接移动设备。 |
- 1
在主界面向上滑动,进入【快捷设置】界面。
- 2
点击【ELRS lua】按钮,即可进入参数配置界面。
- 3
点击对应参数即可进入参数选择界面,选择到对应选项后,点击「切换」键即可保存设置。
06对频说明
为确保遥控器与接收机间建立稳定、安全的通信连接,首次使用或更换接收机时,必须完成对频(Bind)操作。本遥控器支持 ELRS(ExpressLRS)协议,请根据以下步骤完成对频过程。
- 1
在接收机通电状态下,快速插拔电源三次(电源接入一次,断开一次算一次,共三次)。
- 2
此时接收机的 LED 指示灯将以快速双闪表示已进入对频模式。
- 3
打开遥控器,点击主界面中的「对频」按钮;或者在主界面自下向上滑动进入【快捷设置】界面,点击【对频】按钮,即可进入对频状态;等待一段时间后,系统将弹出“对频成功”提示窗口。
01语言设置说明
本遥控器目前暂时支持“简体中文、繁体中文、English”多种语言显示,用户可根据使用习惯切换为熟悉的界面语言,提升使用体验。
- 1
主界面向上滑动进入「快捷设置」。
- 2
依次点击「系统设置」>「语言设置」。
- 3
选中目标语言并点击【确认切换】即可。
- 切换语言后,系统界面所有文本将同步变更,不影响模型数据及通道设置。
- 当前支持的语言类型可能随固件版本不同而有所变化。
- 若切换语言后操作不便,可按照图标顺序重新进入设置界面进行恢复。
02通道设置说明
遥控器提供了灵活的通道配置功能,用户可根据自身模型或飞行器的需求,对每个通道的映射开关、输出方向、最大行程、中心点位置等进行精细化调整。
- 1
主界面向上滑动进入「快捷设置」。
- 2
点击顶部「系统设置」进入菜单,选择「通道设置」按钮。
| 设置项 | 功能说明 |
|---|---|
| 当前输出状态 | 实时显示该通道的输出数值,便于用户观察通道响应及测试效果。 |
| 对应开关 | 设置该通道当前对应的开关(如摇杆、三段开关等),可根据飞控需求切换为其他开关。 |
| 通道反向 | 启用后,该通道的输出方向将完全反转。 |
| 输出量 | 设置通道的最大输出范围(例如 ±100%、±80% 等)。此项调整会同时影响最大值与最小值,不支持单独设定。 |
| 中心点 | 用于设置通道的中立值位置。 |
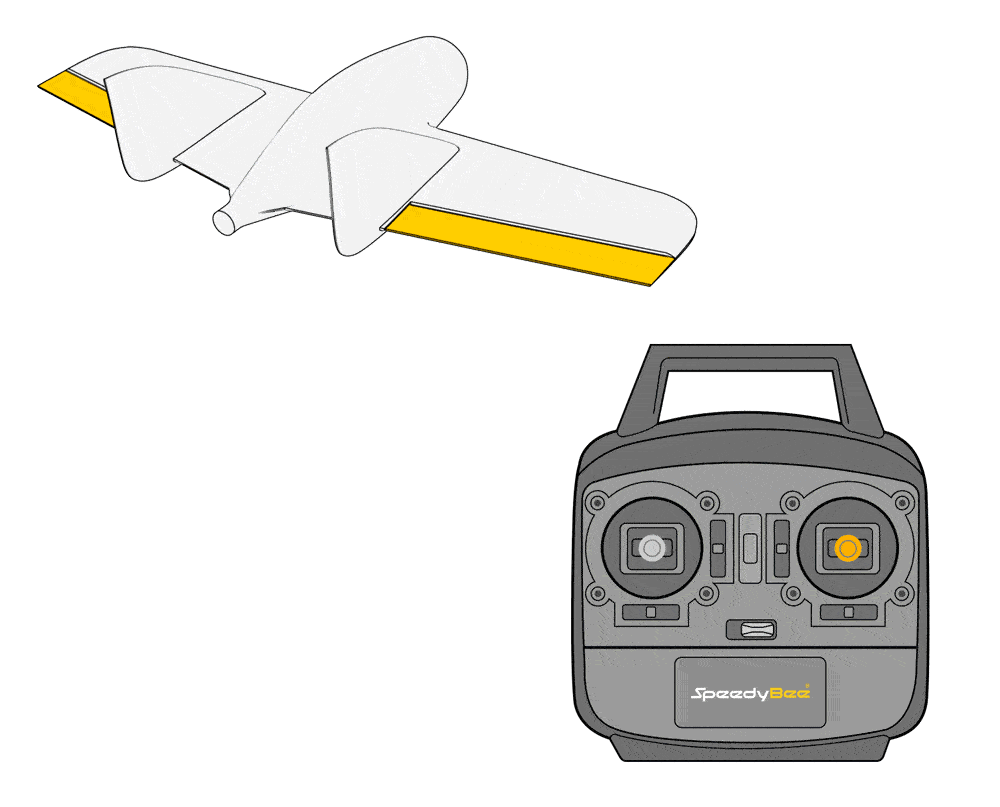
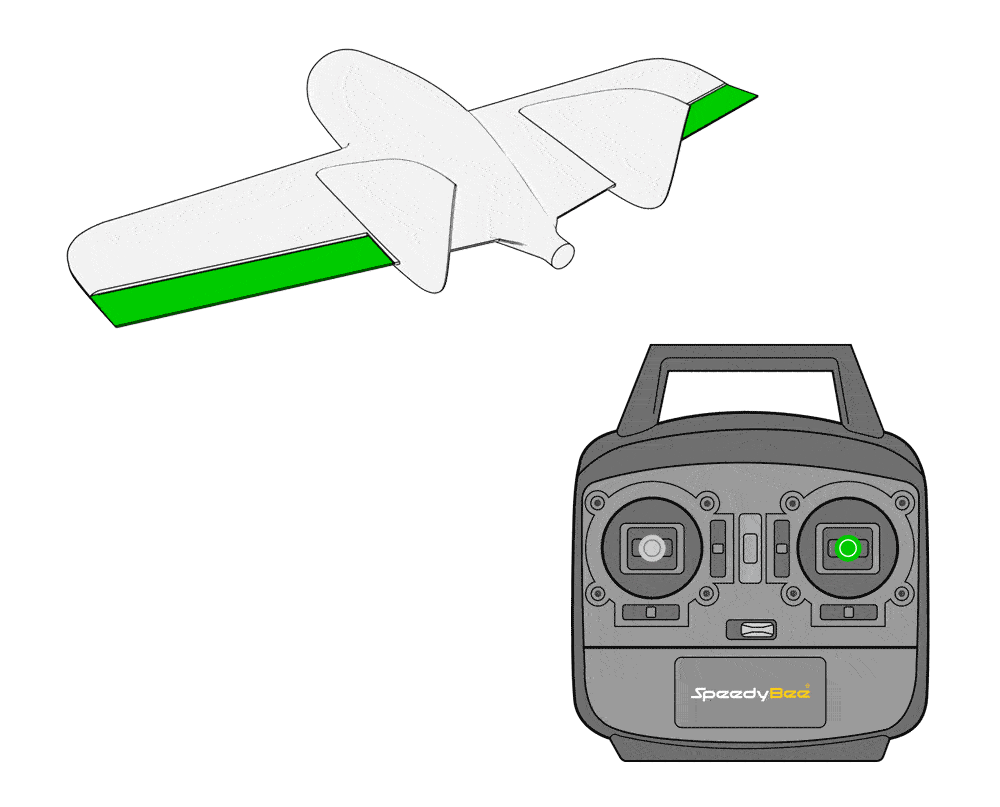
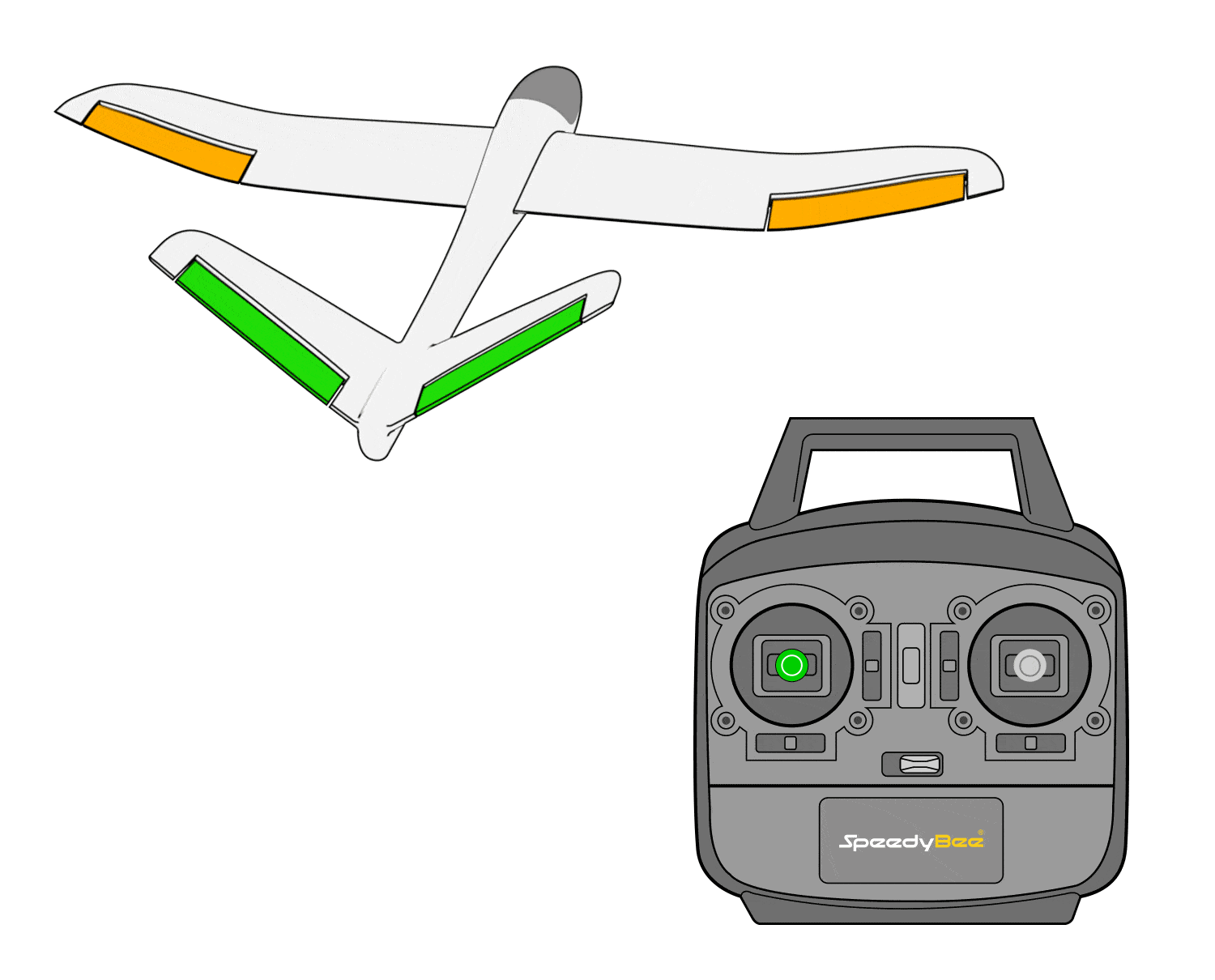
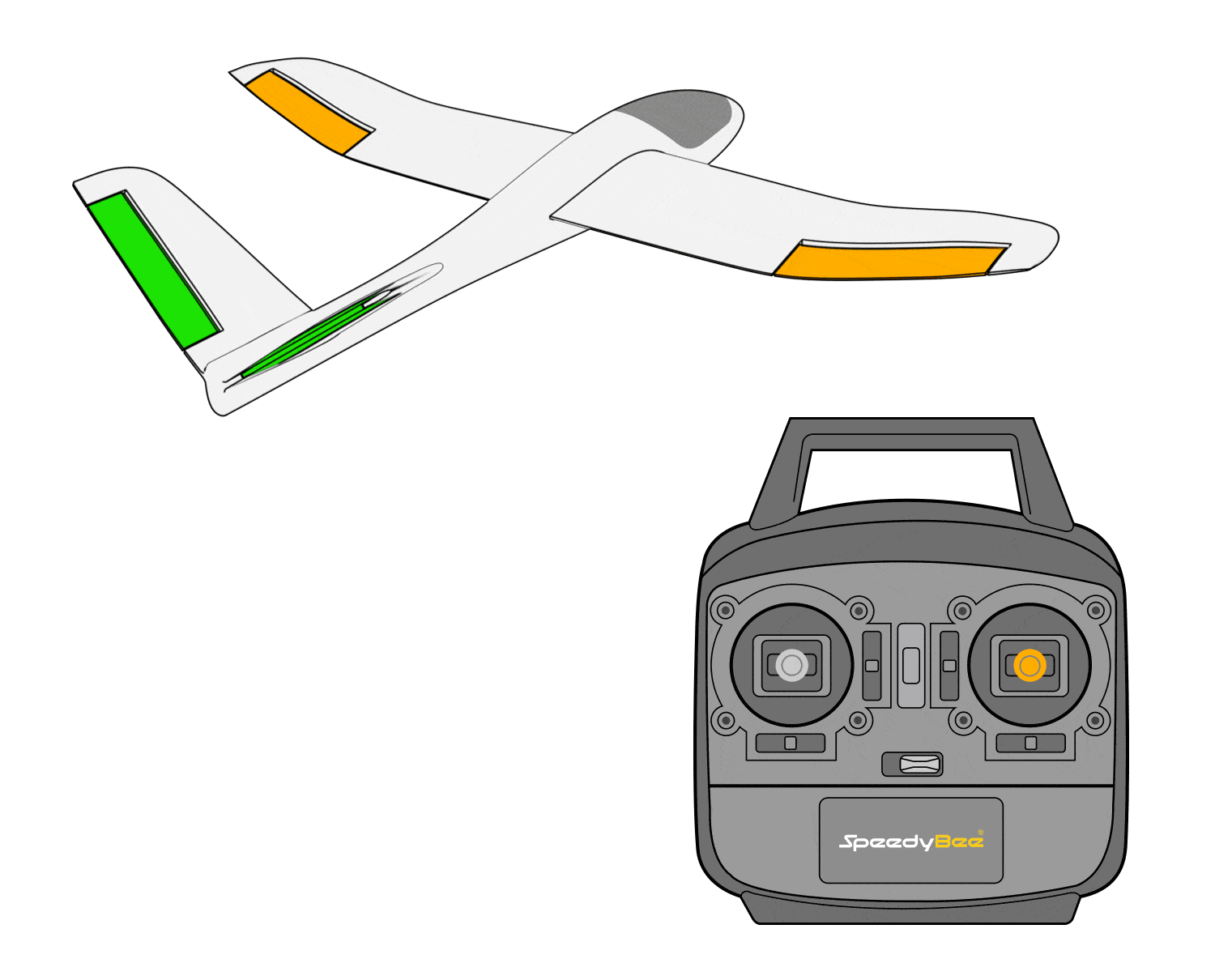
- 1
进入「通道设置」界面,在「对应开关」选项中,根据您的机型选择预设的混控组合。飞翼机型选择 AIL 与 ELE 相关的混控组合;V 尾机型选择 ELE 与 RUD 相关的混控组合。
- 2
设置完成后,请务必在地面拨动摇杆校验舵面实际运动方向。
- 若发现舵面动作相反,请勿直接更改混控模板。请留在「通道设置」界面,利用「通道反向」功能对对应的单一通道进行翻转,直至所有动作均完全符合预期。
03屏幕保护说明
- 1
在主界面向上滑动进入「快捷设置」,点击顶部「系统设置」进入菜单,选择「屏幕保护」按钮。
- 2
出厂默认为打开状态。使用 Oxbot APP 连接遥控器后,可设置屏幕保护开启时间。
04手型切换说明
为了满足不同用户的操控习惯,遥控器支持“美国手”与“日本手”两种操控模式的切换。出厂默认为“美国手”操作模式。
| 模式名称 | 左摇杆功能 | 右摇杆功能 |
|---|---|---|
| 美国手 | 油门 + 偏航 | 俯仰 + 横滚 |
| 日本手 | 俯仰 + 偏航 | 油门 + 横滚 |
- 1
在主界面向上滑动进入「快捷设置」,点击顶部「系统设置」进入菜单,选择「手型切换」按钮。
- 2
根据需求选择【美国手】或【日本手】。静待 2 秒,切换成功后系统将自动返回至设置页面。
- 3
系统切换完成后,如需改变摇杆回弹状态,还需进行物理摇杆调节(见下方步骤)。(遥控器出厂默认为美国手模式)
- 1
打开后盖与取出电池:翻转遥控器,将背部两端橡胶握柄沿凹槽拆下;取出两节 18650 电池。
- 2
调整摇杆机构:使用遥控器附带的 1.5mm 内六角扳手,依次调整对应螺丝。
- 3
完成组装:调整至合适的阻力和回弹手感;按正确正负极安装两节 18650 电池;将橡胶握柄复位至背部两端凹槽内。

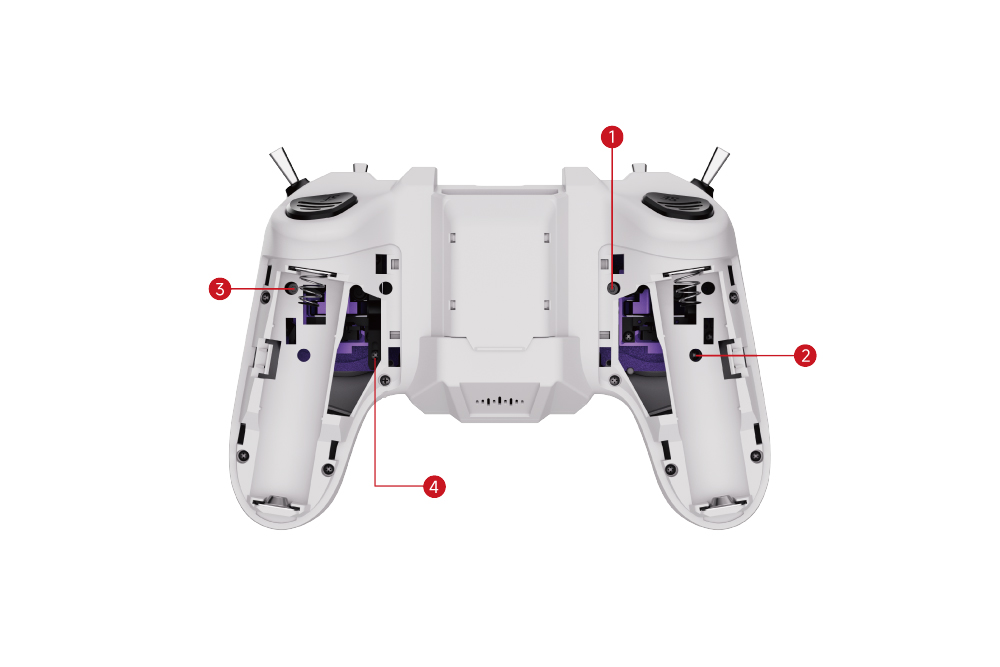
| 螺丝编号 | 调整方向 | 功能说明 |
|---|---|---|
| ① | 逆时针旋转 | 将油门杆改为中心回弹 |
| ② | 逆时针旋转 | 减小油门杆阻力 |
| ③ | 顺时针旋转至底 | 将俯仰杆改为不中心回弹 |
| ④ | 顺时针旋转 | 增加俯仰杆阻力 |
05摇杆校准说明
为确保遥控器摇杆在操作中具有精确的中立点与完整的行程识别范围,建议用户在更换摇杆模块或发现摇杆偏移时,进行摇杆校准操作。遥控器出厂已校准好摇杆,到手后无需进行校准。
- 1
在主界面向上滑动进入「快捷设置」,点击顶部「系统设置」进入菜单,选择「摇杆校准」按钮。
- 2
根据提示,将左右两侧摇杆均处于中心位置,并点击「开始校准」按钮。
- 3
按提示将摇杆向各方向推至行程最远端,直至系统提示完成。
- 校准过程中请确保操作平稳、缓慢,避免快速冲击或卡顿。
- 遥控器水平放置,避免因倾斜影响中立点判断。
- 完成校准后,建议返回【系统设置】界面,进入【查看通道】界面检查各通道中值是否稳定在 1500(或对应中立值)附近。
- 若摇杆存在硬件损坏、卡滞或无反应等情况,请勿尝试校准,应联系售后维修。
06油门锁说明
遥控器提供了灵活的按键绑定机制。用户可根据自身的操作习惯,在系统菜单中将所需拨杆开关映射为「油门锁」。开启此功能后,无论油门摇杆处于何种位置,系统均会强制切断油门通道输出,这是保障外场调试与起降安全的核心防线。
- 1
主界面上滑进入「快捷设置」,点击顶部「系统设置」,选择「油门锁」。
- 2
开启界面中的「油门锁」总开关。
- 3
点击「当前油门锁」选项,随后拨动您希望分配的物理拨杆至目标位置,即可完成该开关与油门锁状态的绑定。
- 油门复位保护:为保障起飞安全,当您尝试解除「油门锁」时,若油门摇杆未处于最低位置,系统将拒绝执行解锁指令。此时需先将油门摇杆拉至最底端,方可成功解除锁定并恢复油门输出。
07恢复默认说明
当遥控器参数设置混乱、系统出现异常,或需要将设备重置为出厂状态时,可使用此功能一键清除自定义配置,恢复至初始预设值。
- 1
主界面上滑进入「快捷设置」,点击顶部「系统设置」,向下滑动,选择「恢复默认」按钮。
- 2
在提示框中再次点击【恢复默认】以确认。等待约 5 秒后,系统清理完毕并自动返回设置页面。
- 数据清空不可逆:此操作将彻底清除所有已保存的模型数据及自定义设置(含混控、通道映射等)。请谨慎操作,并在执行前备份重要参数。
- 需重新初始化:恢复出厂设置后,您必须重新进行手型设置(如美国手/日本手)、摇杆校准以及与飞行器的对频绑定(Bind),否则将无法正常起飞。
- 固件保留:恢复默认仅重置系统参数,不会影响或降低遥控器当前的固件版本。
本节用于解释遥控器界面中常见的回传字段含义,帮助用户快速判断链路质量、电池状态、飞行姿态与导航信息。
这是 ELRS 最核心的数据,主要反映遥控器与接收机之间的通讯质量。
| 缩写 | 全称 | 含义与作用 |
|---|---|---|
| 1RSS / 2RSS | RSSI (Antenna 1/2) | 接收信号强度(单位 dBm) 如果是双天线多样性接收机,会显示两个值。数值越接近 0,信号越强(如 -50dBm 优于 -80dBm)。 |
| RQLY | Link Quality | 上行链路质量 (0-100%) 反映接收机成功收到的数据包百分比。这是判断是否会“断连”最关键的指标,掉到 70% 以下就要小心。 |
| RSNR | Uplink SNR | 上行信噪比(单位 dB) 信号比噪声高出多少。ELRS 可以在负信噪比下工作,但如果该值剧烈波动,说明周围有强干扰。 |
| ANT | Active Antenna | 当前工作天线 对于多样性接收机,显示当前哪根天线在负责接收。 |
| RFMD | RF Mode | 射频模式 / 刷新率 代表当前的包速率(如 500Hz、250Hz 等)。通常对应一个索引数字。 |
| TPWR | Transmit Power | 发射功率(单位:mW) 显示遥控器高频头当前的实时输出功率,尤其在使用动态功率功能时很有用。 |
| TRSS | Telemetry RSSI | 回传信号强度 遥控器接收到飞机传回数据的强度(下行链路)。 |
| TQly | Telemetry Quality | 回传链路质量 遥控器接收回传数据的成功率。 |
| TSNR | Telemetry SNR | 回传信噪比 遥控器端接收回传信号的信噪比。 |
通过飞控(FC)传回的动力电池实时状态。
| 缩写 | 全称 | 含义与作用 |
|---|---|---|
| RxBT | Receiver Battery | 电池电压 通常指飞机的动力电池总电压(由飞控测得并传回)。 |
| Curr | Current | 电流 实时消耗的电流大小,单位 A。 |
| Capa | Capacity | 已消耗容量 本次飞行已经用掉的电量,单位 mAh。 |
| Bat% | Battery Percentage | 剩余电量百分比 基于设置的电压范围估算的剩余电量。 |
反映飞机在空中的即时物理状态。
| 缩写 | 全称 | 含义与作用 |
|---|---|---|
| Ptch | Pitch | 俯仰角 飞机前倾或后仰的角度。 |
| Roll | Roll | 横滚角 飞机左右倾斜的角度。 |
| Yaw | Yaw | 航向角 / 偏航角 飞机机头指向的角度。 |
| FM | Flight Mode | 飞行模式 当前处于什么模式(如:Angle 自稳、Acro 手动、Rescue 救援等)。 |
如果机载安装了 GPS 模块,则会显示以下信息。
| 缩写 | 全称 | 含义与作用 |
|---|---|---|
| GPS | GPS Coordinates | 经纬度坐标 非常重要!如果飞机炸鸡掉草丛里,可以根据遥控器记录的最后一组坐标找回。 |
| GSpd | Ground Speed | 地速 飞机相对于地面的移动速度。 |
| Hdg | Heading | 航向 GPS 测算的移动方向(通常以正北为 0°)。 |
| Alt | Altitude | 高度 相对于起飞点的高度或海拔高度。 |
| Sats | Satellites | 卫星数量 搜到的卫星个数。一般 8 颗以上可以解锁,15 颗以上定位较准。 |